
Basically a Sodar acts like a Sonar but it is so sensitive that instead of detecting targets such as fish, submarines etc… it is able to receive signals which are “backscattered” by the air itself or more exactly by small scale temperature differences in the air. It acts like a pulsed radar or lidar alternating an emission sequence followed by a receiving sequence. The altitude sampling corresponds to the roundtrip of the sound to reach such altitude during the receiving mode.
As the air is moving the backscattered signal frequency is shifted when compared to the emitted signal frequency. This is the so called Doppler effect such as the frequency shift that can be heard when a car is passing by honking one’s horn. Measuring the Doppler shift along one beam axis gives the corresponding radial wind speed.
As the wind is three dimensional we need to make measurements along three different directions from the antenna. Actually we use 5 beams.
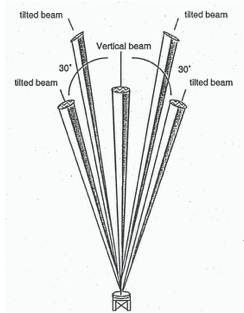
In order to speed up the measurements, in each vertical plane the emission takes place along one tilted beam and its symetrical beam in sequence and the received signals are processed simultaneously.
Moreover as in a vertical plane the radial wind speeds along the tilted beam and its symetrical must be of equal modulus and opposite sign this is used as a very strong validation criteria.
While the antenna is fixed tilting the acoustic beam is achieved by phase shifting between the lines or the columns of the “phased array” antenna:

Contrary to what shows on some of our Sodar competitors websites or even in so called “scientific” papers the only effect of rain is generating acoustic noise through the impact of the rain drops on the antenna receivers. Actually the rain drops size being much smaller than the acoustic wavelength, their down speed is not detected by sodars. However poorly designed Sodars will exhibit spurious down speeds due to high harmonics of either 50 Hz or 60 Hz harmonics of the power supply in humid conditions.
As stated above, rain generates acoustic noise. Therefore above a certain limit the Sodar will cease generating measurements. With our Sodars the upper limit is typically 1 cm to 2 cm /h of rainfall rate depending on atmospheric conditions and model type.
Snow flakes being significantly bigger than rain drops are detected by Sodars. Furthermore snow flakes impacting the antenna generate a negligible acoustic noise. Last, being at a different temperature than the temperature of the ambient air the backscattered echoes are strong (as explained in “how a Sodar works” the echo is due to small local temperature differences) . Of course if there is a snow storm the antenna heating might need 2 to 3 hours to clean the antenna but as a general statement Sodars like snow.
Regarding fog, as it is associated to small scale thermal turbulence Sodars do like fog.
When the ambient acoustic noise increases, the ratio between the signal which is backscattered from the air and the received ambient acoustic noise decreases. Above a certain noise level no more useful signal detection is possible. Typically our Sodars can measure in up to 65dBA (industrial area).
Although our Sodar antennas achieve almost 50 dB (a ratio of 300 in amplitude) directivity between the main lobe and the so called secondary lobes almost parallel to the ground, a small energy is emitted towards nearby obstacles (trees, buildings, meteorological towers etc…). This energy also generates an audible sound nearby.
As obstacles reflect the acoustic energy much more efficiently than the air itself the ground clutter can be similar or even more powerful than the useful signal which is backscattered by the atmosphere.
Over tens of years Remtech has refined signal processing which suppresses ground clutter up to a high level. Typically our instruments can handle a horizontal distance to an obstacle equal to its height. Additionally if the acceptable ground clutter limits are exceeded (for instance because of a massive building nearby) this shows in the data file header.
High winds are of course associated with high surface winds. These generate aerodynamically a high ambient noise and therefore reduce the altitude range and at the extreme will forbid any measurement. With our extra acoustic enclosure which is designed to divert the flow above the acoustic antenna and at the same time reduce turbulence we can measure up to 15 m/s at ground level and therefore up to 30/40 m/s at higher levels
The small electronics/computer case which is fixed underneath the antenna stores the data on a SSD disk with many years of data storage capability. Each Sodar is supplied with a netbook allowing data retrieval locally through an ethernet cable or Wi-Fi connection. For remote retrieval we offer two options: either wireless modem connection or satellite connection.
The data are in text mode (ASCII code) and can be very easily imported into “EXCEL”. Also we provide at no cost an application software which makes them compatible with specialized softwares such as “WindPro”.
Advantages
- they are much lower cost
- they are much more reliable and durable (we have systems at nuclear power plants running day and night for emergency response since over 20 years and this without any repair !). This is thanks to our software oriented design allowing hardware minimization and thus increased reliability.
- they do not need any yearly check up or calibration
- their maintenance is minimal: cleaning the antenna from leaves and debris once in a while. Also replacing the velcro stripped acoustic foam every 2 to 3 years.
- their power consumption is much less allowing powering by Solar panels. Moreover for our smallest model, PA-XS, the antenna is so small (24×24 cm) that it can be heated against freeze and snow using a small solar power system
- for a similar altitude range our systems are much lighter allowing for PA-XS and PA0 easy transportation by hand (the heaviest part is 20 Kg)
- as a Sodar is sensitive to small scale temperature turbulence we have developed a very unique technique providing air temperature lapse rate for each Sodar altitude layer. As our systems measure the temperature at their level a full temperature profile can be obtained by a step by step integration. Among all Sodar’s on the market only Remtech can apply this method as it needs a high measurement precision both of wind speed turbulence and backscattered echo.
Disadvantages
- they make some noise.
- they cannot operate if the ambient acoustic noise is too high.
- their precision (although better than radars) is slightly lower than the precision of the best Lidars.
- they cannot operate very close to large obstacles while the Lidars can (but our Sodars perform better than radars thanks to our multi-frequency coding and ground clutter suppression algorithms).